Every time I’m writing complex rules in my code, I remember there’s a machine learning technique for this: Reinforcement Learning. RL models are able to learn the optimal rules given predefined rewards. Read on to learn how!
Reinforcement Learning
Reinforcement learning is a branch of machine learning where the goal is to train an intelligent agent to take actions in an environment in order to maximize a “reward”. RL has famously been used to defeat the best human players in Go (the board game, not the programming language), but the approach is generic enough to extend to domains beyond gaming (robotics, natural language processing, etc.).
In this post we will explore creating a RL agent of our own to play Tetris. If you just want the code, you can check out the repo here.
Prerequisites
This is a Python project with some dependencies:
- gymnasium, a RL framework from OpenAI, the makers of ChatGPT
- stable-baselines3, a Python library with several implemented RL algorithms
- pyensign, the Ensign Python SDK so we can store and retrieve trained models
- pyboy, a handy GameBoy emulator for Python
- numpy and pandas, Python ML staples
- python-ulid, because sortable IDs are nice
Going to the Gym
To build our agent we will use gymnasium, an open source (MIT License) Python package from the same organization behind ChatGPT.
Our training loop will look something like this:
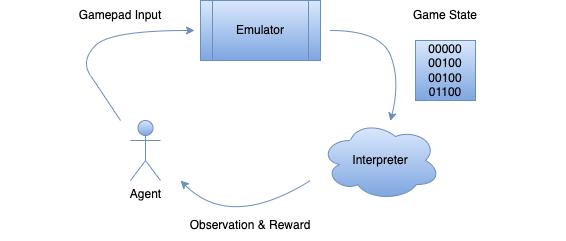
At each step the agent takes an action from the available action space {A, B, Up, Down, Left, Right, Pass} and makes an input to the emulator where the game is running. Then the agent receives a representation of the game state along with the reward for taking the action. The goal is to incentivize the agent to take actions that yield the best cumulative reward over time.
Note that unlike supervised learning, we don’t need any labeled data. In fact, we’ll be training the agent to play Tetris without telling it the “rules” of the game or how to score points!
We can create a custom TetrisEnv that subclasses gymnasium.Env and implements the following methods: reset(), step(), render().
reset
Reset the state of the game to the initial state. This is called at the beginning of each “episode” (e.g. when the board gets filled and it’s game over). We also introduce some randomness here to ensure that the agent explores more possible states of the game and it doesn’t get accidentally optimize for one scenario.
def reset(self, seed=None):
super().reset(seed=seed)
# Load the initial state
if self.init_state != "":
with open(self.init_state, "rb") as f:
self.pyboy.load_state(f)
# Randomize the game state
if seed is not None:
for _ in range(seed % 60):
self.pyboy.tick()
observation = self.render()
self.current_score = self.get_total_score(observation)
self.board = observation
return observation, {}
render
Render defines what the current observable state of the game is. In this method we extract a simplified version of the board as a multi-dimensional numpy array so that the model has something to work with.
def render(self):
# Render the sprite map on the backgound
background = np.asarray(self.manager.tilemap_background()[2:12, 0:18])
self.observation = np.where(background == 47, 0, 1)
# Find all tile indexes for the current tetromino
sprite_indexes = self.manager.sprite_by_tile_identifier(self.sprite_tiles, on_screen=False)
for sprite_tiles in sprite_indexes:
for sprite_idx in sprite_tiles:
sprite = self.manager.sprite(sprite_idx)
tile_x = (sprite.x // 8) - 2
tile_y = sprite.y // 8
if tile_x < self.output_shape[1] and tile_y < self.output_shape[0]:
self.observation[tile_y, tile_x] = 1
logging.debug("Board State:\n{}".format(self.observation))
return self.observation
step
Step is called to advance the state of the game once step by applying a button press (or sometimes no button press). It needs to return the current state of the board and also the reward for taking the action. To start, we will give out a positive reward for an action that increases the in-game score and a massive negative reward for reaching the “Game Over” state.
def step(self, action):
self.do_input(self.valid_actions[action])
observation = self.render()
if observation[0].sum() >= len(observation[0]):
# Game over
return observation, -100, True, False, {}
# Set reward equal to difference between current and previous score
total_score = self.get_total_score(observation)
reward = total_score - self.current_score
self.current_score = total_score
self.board = observation
logging.debug("Total Score: {}".format(total_score))
logging.debug("Reward: {}".format(reward))
return observation, reward, False, False, {}
Tracking Training Runs
When training machine learning models it’s often necessary to keep tabs on how the training is progressing. The stable_baselines3 library has an interface for creating custom log writers, so why don’t we create an Ensign writer? When the write method is called, it will publish an Event to an Ensign topic, similar to writing a log event to a file on disk.
import json
import asyncio
import logging
import numpy as np
from pyensign.events import Event
from stable_baselines3.common.logger import KVWriter, filter_excluded_keys
class EnsignWriter(KVWriter):
"""
EnsignWriter subclasses the Stable Baselines3 KVWriter class to write key-value pairs to Ensign.
"""
def __init__(self, ensign, topic="agent-training", agent_id=None):
super().__init__()
self.ensign = ensign
self.topic = topic
self.version = "0.1.0"
self.agent_id = agent_id
async def publish(self, event):
"""
One-off publish to Ensign.
"""
await self.ensign.publish(self.topic, event)
try:
await self.ensign.flush()
except asyncio.TimeoutError:
logging.warning("Timeout exceeded while flushing Ensign writer.")
def write(self, key_values, key_excluded, step=0):
"""
Write the key-value pairs to Ensign.
"""
meta = {"step": step}
if self.agent_id:
meta["agent_id"] = str(self.agent_id)
key_values = filter_excluded_keys(key_values, key_excluded, "ensign")
for key, value in key_values.items():
# JSON doesn't support numpy types
if isinstance(value, np.float32):
key_values[key] = float(value)
event = Event(json.dumps(key_values).encode("utf-8"), mimetype="application/json", schema_name="training_log", schema_version=self.version, meta={"agent_id": str(self.agent_id), "step_number": str(step)})
# Invoke publish in the appropriate event loop
publish = self.publish(event)
try:
loop = asyncio.get_event_loop()
except RuntimeError:
asyncio.run(publish)
return
asyncio.run_coroutine_threadsafe(publish, loop)
def close(self):
"""
Close the Ensign writer.
"""
asyncio.run(self.ensign.close())
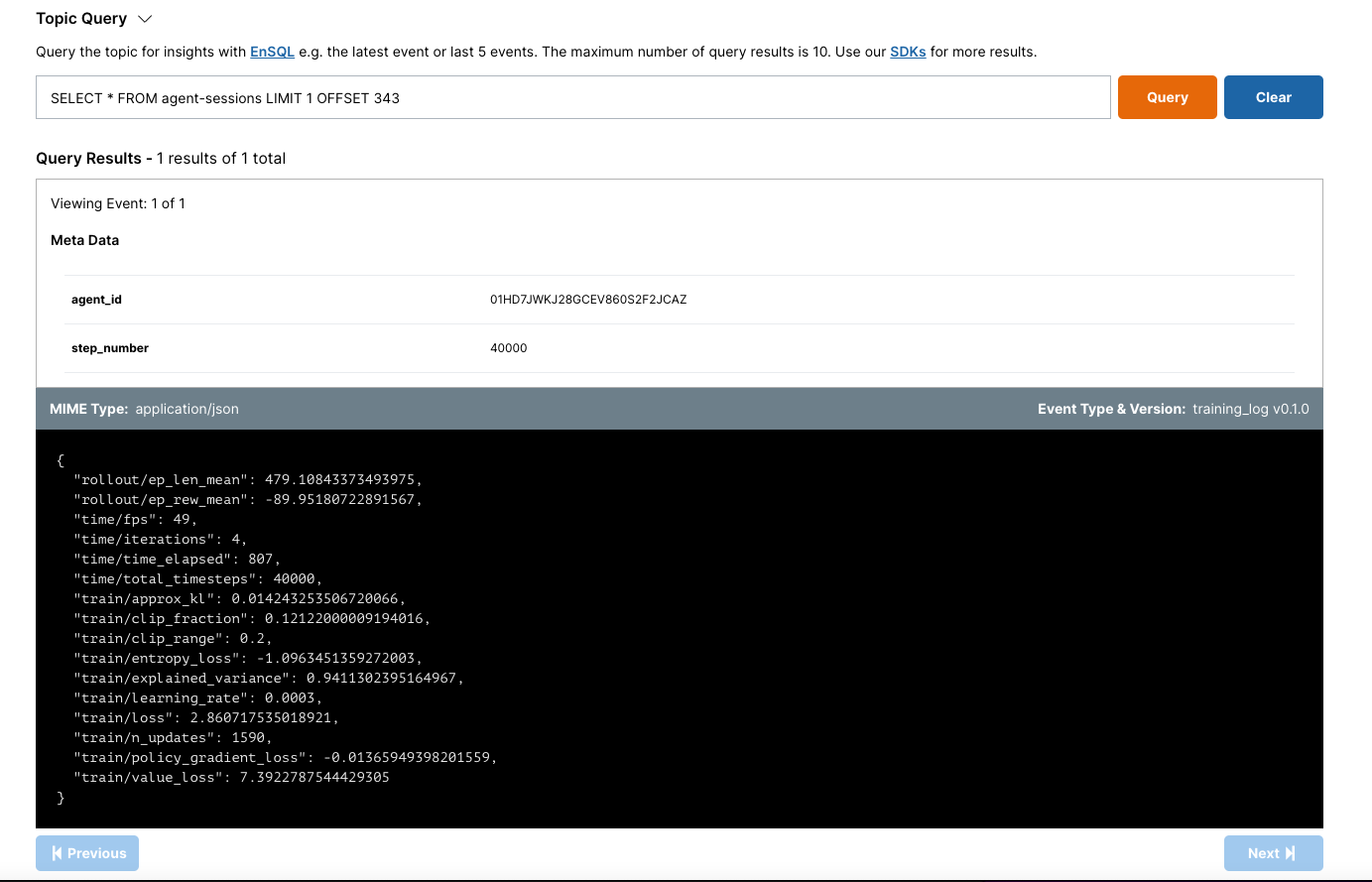
The cool part is that this lets us inject our own metadata tags which we can query on later. In the Ensign topic dashboard, we will be able to lookup previous training sessions to quantify training progress.
Starting the Training
Now that we have a RL environment setup, it’s time to train some models! Since we will probably be experimenting with different types of models is usually helpful to create a generic “trainer” class.
import io
import os
import asyncio
from datetime import datetime
import numpy as np
from ulid import ULID
import stable_baselines3
from pyensign.events import Event
class AgentTrainer:
"""
AgentTrainer can train and evaluate an agent for a reinforcement learning task.
"""
def __init__(self, ensign=None, model_topic="agent-models", model_dir="", agent_id=ULID()):
self.ensign = ensign
self.model_topic = model_topic
self.agent_id = agent_id
self.model_dir = model_dir
async def train(self, model, sessions=40, runs_per_session=4, model_version="0.1.0"):
"""
Train the agent for the specified number of steps.
"""
model_name = model.__class__.__name__
policy_name = model.policy.__class__.__name__
if self.ensign:
await self.ensign.ensure_topic_exists(self.model_topic)
if self.model_dir:
os.makedirs(self.model_dir, exist_ok=True)
# Train for the number of sessions
for _ in range(sessions):
session_start = datetime.now()
model.learn(total_timesteps=model.n_steps * runs_per_session)
session_end = datetime.now()
duration = session_end - session_start
# Ensure that async loggers have a chance to run
await asyncio.sleep(5)
# Save the model
if self.ensign:
buffer = io.BytesIO()
model.save(buffer)
model_event = Event(buffer.getvalue(), "application/octet-stream", schema_name=model_name, schema_version=model_version, meta={"agent_id": str(self.agent_id), "model": model_name, "policy": policy_name, "trained_at": session_end.isoformat(), "train_seconds": str(duration.total_seconds())})
await self.ensign.publish(self.model_topic, model_event)
if self.model_dir:
model.save(os.path.join(self.model_dir, "{}_{}.zip".format(model_name, session_end.strftime("%Y%m%d-%H%M%S"))))
if self.ensign:
await self.ensign.flush()
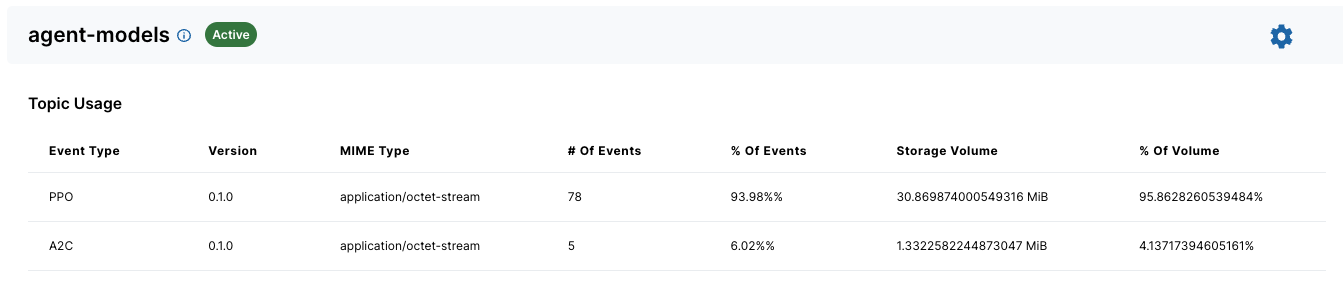
Storing the models in Ensign gives us a convenient way to checkpoint the model at the end of each session. Note that we are including the model name and version as part of the event schema which allows us to keep track of which models we’ve trained.
At this point we can kick off the training with a PPO model from the stable_baselines3 library.
import asyncio
import argparse
from ulid import ULID
from stable_baselines3 import PPO
from pyensign.ensign import Ensign
from stable_baselines3.common.logger import Logger, make_output_format
from agent import AgentTrainer
from writer import EnsignWriter
from tetris_env import TetrisEnv
def parse_args():
# Parse the command line arguments
...
async def train(args):
# Create Ensign client
ensign = Ensign(cred_path=args.creds)
# Configure the environment, model, and trainer
agent_id = ULID()
env = TetrisEnv(gb_path=args.rom, action_freq=args.freq, speedup=args.speedup, init_state=args.init, log_level=args.log_level, window="headless")
trainer = AgentTrainer(ensign=ensign, model_topic=args.model_topic, agent_id=agent_id)
model = PPO(args.policy, env, verbose=1, n_steps=args.steps, batch_size=args.batch_size, n_epochs=args.epochs, gamma=args.gamma)
# Set logging outputs
output_formats = []
if args.log_stdout:
output_formats.append(make_output_format("stdout", "sessions"))
if args.session_topic:
writer = EnsignWriter(ensign, topic=args.session_topic, agent_id=agent_id)
output_formats.append(writer)
model.set_logger(Logger(None, output_formats=output_formats))
await trainer.train(model, sessions=args.sessions, runs_per_session=args.runs)
await ensign.close()
if __name__ == "__main__":
asyncio.run(train(parse_args()))
Evaluation
Now that all our models are in Ensign, it’s possible to evaluate any iteration of the PP0 model against a baseline. For example, if we want to evaluate the latest PP0 model we can use a pyensign query to retrieve it.
# Get the most recent model for the schema
model_events = await ensign.query("SELECT * FROM agent-models.PP0").fetchall()
model = model_events[-1]
# Deserialize the model from the event
buffer = io.BytesIO(model.data)
model_class = getattr(stable_baselines3, model.meta["model"])
model = model_class.load(buffer)
# Run the model in the environment
for _ in range(runs):
seed = np.random.randint(0, 100000)
obs, _ = env.reset(seed=seed)
terminated = False
steps = 0
while not terminated:
action, _states = model.predict(obs, deterministic=True)
obs, reward, terminated, _, _ = env.step(action)
env.render()
steps += 1
print("{}: Seed: {}, Steps: {}, Score: {}".format(schema, seed, steps, env.get_score()))
The random baseline model never manages to score points. After training the PPO model for ~1.6 million steps, it actually starts to complete some lines. Also, on average it survives longer than the random model. I think we can declare victory!
| Baseline | PPO Model |
|---|---|
 |  |
Using model PPO v0.1.0
Baseline: Seed: 21523, Steps: 486, Score: 0
PPO v0.1.0: Seed: 21523, Steps: 518, Score: 0
Baseline: Seed: 96145, Steps: 328, Score: 0
PPO v0.1.0: Seed: 96145, Steps: 496, Score: 0
Baseline: Seed: 96558, Steps: 315, Score: 0
PPO v0.1.0: Seed: 96558, Steps: 532, Score: 0
Baseline: Seed: 80284, Steps: 308, Score: 0
PPO v0.1.0: Seed: 80284, Steps: 554, Score: 64
Baseline: Seed: 40057, Steps: 374, Score: 0
PPO v0.1.0: Seed: 40057, Steps: 524, Score: 64
Baseline: Seed: 80484, Steps: 486, Score: 0
PPO v0.1.0: Seed: 80484, Steps: 589, Score: 64
What Next?
So, if you’re looking for clever ways to automate decision making at work, don’t forget about reinforcement learning! Just like Tetris, it might take a bit of practice to get the hang of. But once you’ve added RL to your toolkit, you’ll see that it’s a much more flexible (and often less bug-prone) method compared to manually writing out a ton rules in your code. Even better, RL can uncover novel insights that supervised machine learning models cannot, thanks to tricks like the explore/exploit algorithm.
The best way to get good at RL? Get some practice objectively defining your reward (or punishment), and experiment with different policies and algorithms. Using the RL framework in our Tetris example, you should be able to do that a lot more quickly!
Here are some things you could try next:
- Experiment with different RL models and policies
- Create a more nuanced reward function that rewards shorter-term actions (e.g. minimize the number of “holes” in the board)
- Parallelize the training to explore the decision space
Note that since each agent has a unique ID, training multiple agents at once is not a problem since we can always query on the agent ID in the metadata tags.
Credits
This post is heavily inspired by the repo here which tackles a much more complicated game environment!
Photo by Ravi Palwe on Unsplash