

One of the first steps in every data science or machine learning project is data ingestion. In this module, you will use Python to create a publisher to ingest real-time data into Ensign.
Check out the previous modules in this series if you haven’t already! Module 1 shows how to set up your Ensign project, Module 2 gets you started with the PyEnsign SDK, and Module 3 helps you create your first topic.
Want to skip to the full code example for this module? You can find it here.
What is a Publisher?
In Ensign, a publisher is a little piece of code that writes data as a series of events to one or more topics. If you followed along with Module 2, congrats! You’ve already written your first publisher. In practice, publishers can do a lot of ingestion-related work on your behalf for a variety of purposes. Here are a few examples of the different types of publishers that you could write for Ensign:
- Poll a REST API of weather data every 5 minutes and publish JSON weather updates to a topic.
- Subscribe to a websocket API for stock trades and publish real-time ticker prices to a topic for data visualization.
- Publish web requests and errors from your backend server(s) so you can monitor user activity on your web application.
- Process video frames from a security camera feed and publish an event when a figure is detected.
- Subscribe to an Ensign topic containing user reviews and publish sentiment scores to another topic.
Let’s return to our flight tracker example that we’ve been working on through the last few modules and write some code to publish real-time flight updates.
Creating a Flights Publisher
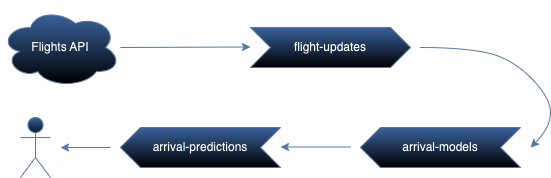
Recall the data flows design we created in Module 3. In this module we will write the Python code that reads from the flights API and publishes updates to the flight-updates topic.
⚠️ WARNING: To obtain access to real-time flight data, you will need to create an OpenSky network account (at the time of writing it’s free) by registering here. Please do that first before moving on to the next section!
Now that you’ve registered for your OpenSky username and password, we’re ready to proceed. We could write the HTTP requests directly, but to make our lives easier we’ll use the python-opensky library, so go ahead and install that now.
$ pip install async-timeout
$ pip install python-opensky
Note: You can also install OpenSky’s official python implementation but it might not be compatible with the code in this module.
Publisher Class
In Python, classes are a helpful way to organize code, especially if this will eventually run in production. So let’s create a publisher.py with a FlightsPublisher class.
import os
import json
import asyncio
from datetime import datetime
from pyensign.events import Event
from pyensign.ensign import Ensign
from aiohttp import ClientSession, BasicAuth
from python_opensky import OpenSky, BoundingBox
class FlightsPublisher:
def __init__(
self,
topic="flight-positions",
min_latitude=-66,
max_latitude=49,
min_longitude=-124,
max_longitude=24,
interval=60,
):
self.topic = topic
self.bounding_box = BoundingBox(
min_latitude=min_latitude,
max_latitude=max_latitude,
min_longitude=min_longitude,
max_longitude=max_longitude,
)
self.interval = interval
self.ensign = Ensign()
self.opensky_creds = BasicAuth(
login=os.environ['OPENSKY_USERNAME'],
password=os.environ['OPENSKY_PASSWORD']
)
Here we setup a few class variables:
topic: The topic our publisher will publish tobounding_box: The bounding box coordinates for querying the OpenSky API (what area to query for flights over)interval: The interval to wait in between polling for flight updatesensign: The Ensign client configured with API credentials from the environmentopensky_creds: OpenSky API credentials obtained from the environment
Creating Events
The OpenSky API returns multiple flight “vectors” per response, so it will be helpful to write a function to turn the vectors into serializable events.
def vectors_to_events(self, vectors):
for vector in vectors:
data = {
"icao24": vector.icao24,
"callsign": vector.callsign,
"origin_country": vector.origin_country,
"time_position": vector.time_position,
"last_contact": vector.last_contact,
"longitude": vector.longitude,
"latitude": vector.latitude,
"geo_altitude": vector.geo_altitude,
"on_ground": vector.on_ground,
"velocity": vector.velocity,
"true_track": vector.true_track,
"vertical_rate": vector.vertical_rate,
"sensors": vector.sensors,
"barometric_altitude": vector.barometric_altitude,
"transponder_code": vector.transponder_code,
"special_purpose_indicator": vector.special_purpose_indicator,
"position_source": vector.position_source,
"category": vector.category,
}
yield Event(
data=json.dumps(data).encode("utf-8"),
mimetype="application/json",
schema_name="FlightVector",
schema_version="0.1.0",
)
This function takes an iterable of vectors and returns a generator of JSON-encoded flight updates. It’s best practice to include a schema_name and schema_version (as a semantic version) if possible; it will be useful later on if the API changes or you decide that you want to include more metadata, so subscribers know what to expect in each event.
Pro Tip: For data streaming, it’s often more efficient to use generator patterns with yield rather than collecting all the events in a list in memory. Your RAM will thank you!
The Publish Loop
In each iteration of the main loop we will call the API, publish all the flight vectors as events to Ensign, then wait for a bit to stay under the API rate limits.
async def recv_and_publish(self):
# Create topic if it doesn't exist
await self.ensign.ensure_topic_exists(self.topic)
async with ClientSession() as session:
async with OpenSky(session=session) as opensky:
opensky.authenticate(self.opensky_creds)
while True:
# Call the OpenSky API to get flight vectors in the bounding box
try:
response = await opensky.get_states(
bounding_box=self.bounding_box
)
except Exception as e:
print(e)
await asyncio.sleep(self.interval)
continue
# Publish each flight vector to Ensign
for event in self.vectors_to_events(response.states):
await self.ensign.publish(
self.topic,
event,
on_ack=self.print_ack,
on_nack=self.print_nack
)
await asyncio.sleep(self.interval)
Note the on_ack and on_nack arguments on the publish function. These are optional but allow you to specify callbacks when Ensign acknowledges an event, meaning it has been committed to the topic, and when Ensign fails to commit an event (a negative acknowledgement). Here we’ll define some callbacks that just print out the acks and nacks.
async def print_ack(self, ack):
print(f"Event committed with ack: {ack}")
async def print_nack(self, nack):
print(f"Event was not committed with error {nack.code}: {nack.error}")
Finishing up the Publisher
Finally we need some asyncio boilerplate so we can execute the publish loop from the command line.
def run(self):
asyncio.run(self.recv_and_publish())
if __name__ == "__main__":
publisher = FlightsPublisher()
publisher.run()
If you need to look at the complete code, it’s available here.
Running the Publisher
Before running the publisher, make sure you have the following environment variables configured!
$ export ENSIGN_CLIENT_ID=<my-client-id>
$ export ENSIGN_CLIENT_SECRET=<my-client-secret>
$ export OPENSKY_USERNAME=<my-opensky-username>
$ export OPENSKY_PASSWORD=<my-opensky-password>
Now run the publisher to start publishing events!
$ python publisher.py
If everything worked, you should see several events being committed (remember the output is coming from the print_ack handler).
Event committed with ack: id: "\001\214\035\004ju\267\335<\204G\014-\234\030V"
committed {
seconds: 1701293878
nanos: 211286609
}
Event committed with ack: id: "\001\214\035\004ju\200\232\357M\313\345\320\366\007\324"
committed {
seconds: 1701293878
nanos: 213323032
}
Event committed with ack: id: "\001\214\035\004jv\251\035]u\034i7.\033k"
committed {
seconds: 1701293878
nanos: 215672990
}
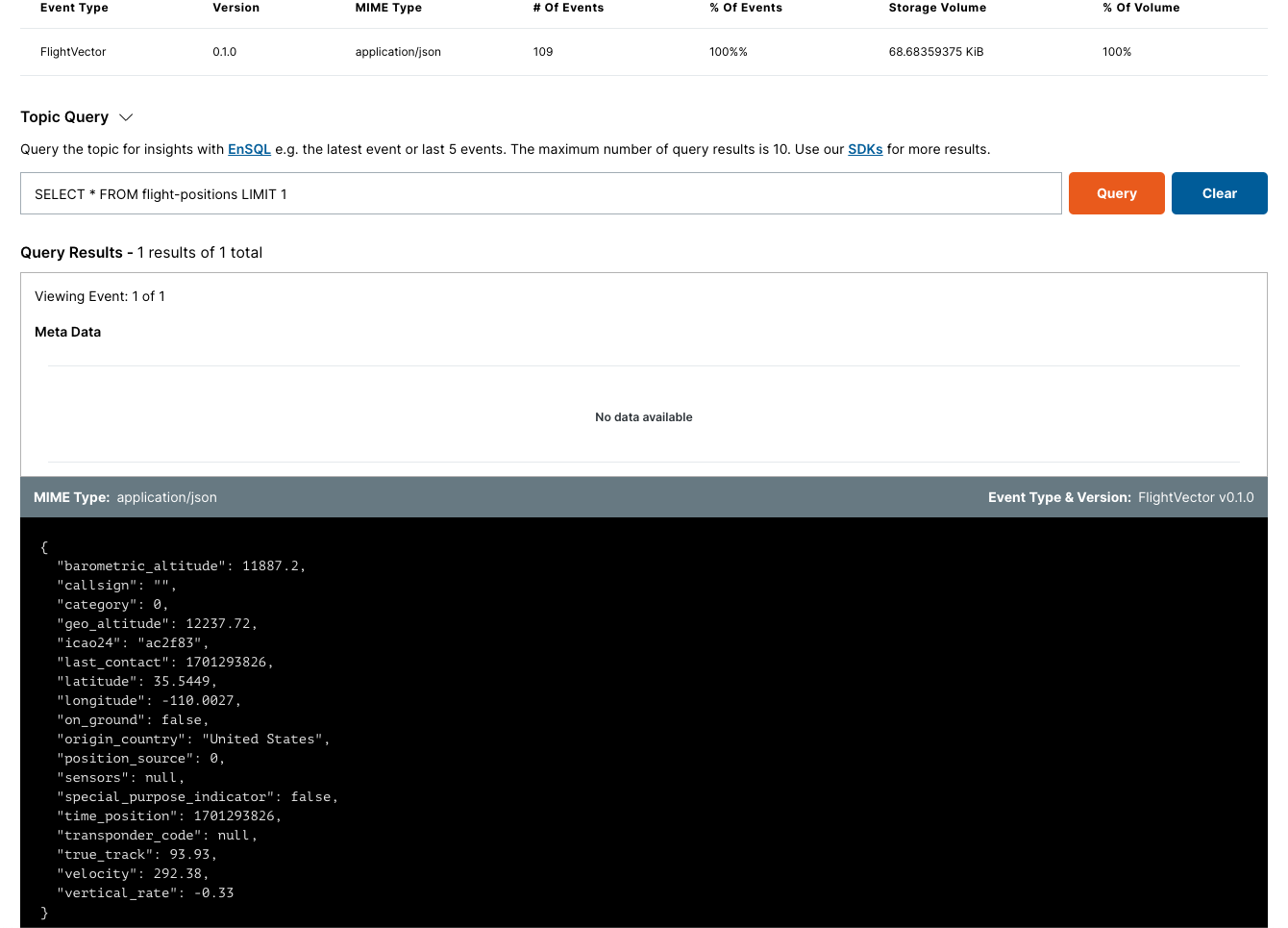
How do we know if it worked? The easiest way is to open the project dashboard and navigate to your project, and then the flight-positions topic. On this page you can see how many events were published to the topic and run a query to view the actual events.
To be continued…
Now that you have a flights publisher, in the next module you’ll write a subscriber to consume the flight updates in real time!
Photo by Bank Phrom on Unsplash







